Introducción al sistema
Objetivos
Establecer un sistema de excavación eficiente y rápido que integre "excavación, soporte y transporte" para integrar los procesos distribuidos tradicionales de excavación, transporte y soporte a través de nuevas tecnologías y equipos, realizar operaciones paralelas de excavación y anclaje, soporte simultáneo por múltiples brazos, trituración y transporte continuos, ventilación de presión larga y extracción corta y control inteligente remoto, y lograr una automatización de excavación verdaderamente integral.
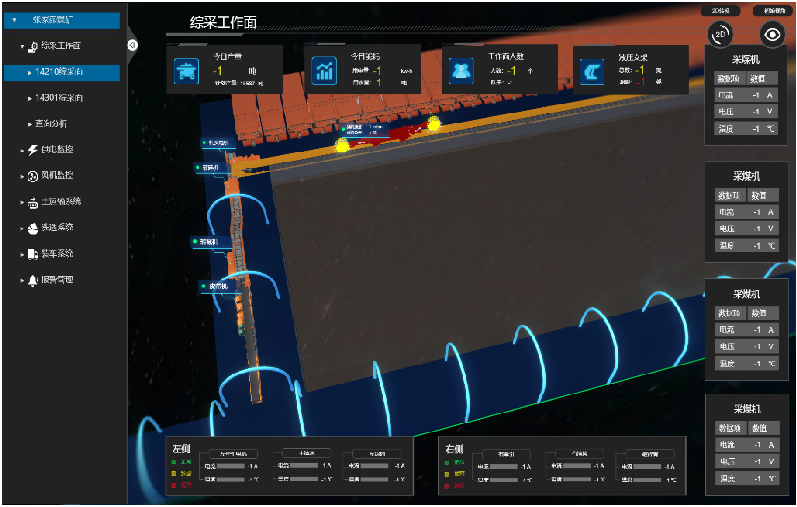
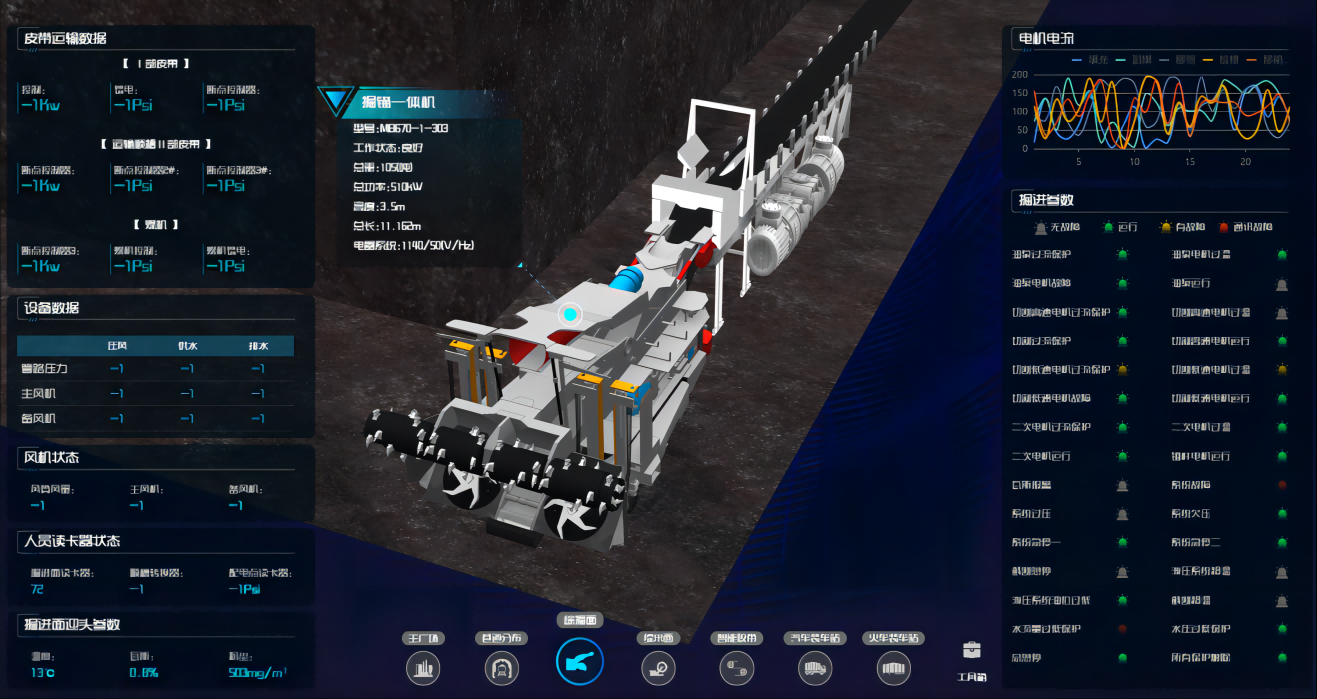
Monitoreo digital del frente de trabajo de excavación
1. Recopile datos y cárguelos en la consola de monitoreo remoto subterráneo y en el centro de subcontrol terrestre para realizar la función de visualización y control en tiempo real del estado de la máquina perforadora de anclaje.
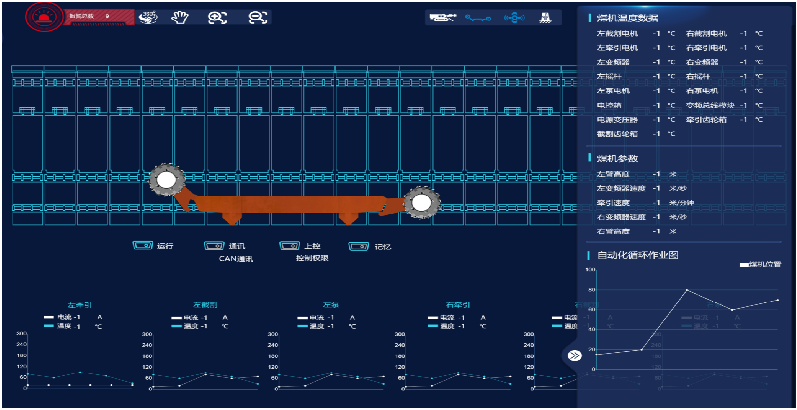
2. El estado operativo de la máquina de rotura y transporte de anclas se muestra en tiempo real en la consola de monitoreo remoto subterránea y el centro de subcontrol terrestre, y se proporciona la función de autodiagnóstico de fallas eléctricas y recordatorio de mantenimiento regular y envío de información.
3. El sistema de navegación combinado consta de un transmisor láser, un objetivo receptor láser, un sensor de inclinación y un controlador para realizar la navegación direccional del equipo.
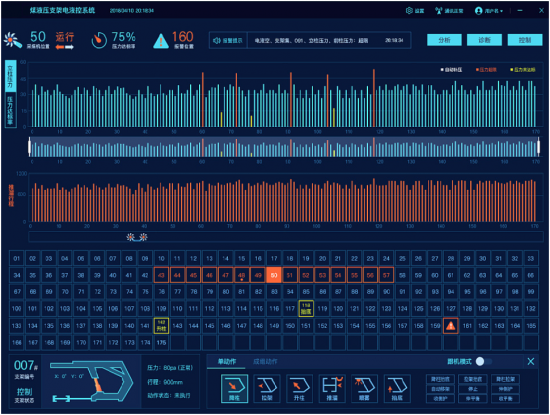
4. El control colaborativo multimáquina consta del sistema de control de equipos, sensores, subestaciones de control, estaciones de control principales y sistemas de monitoreo superiores. Cada componente está integrado en un sistema unificado de monitoreo de excavaciones subterráneas a través de la red y opera de forma estable según el proceso de operación.
Función del sistema
-
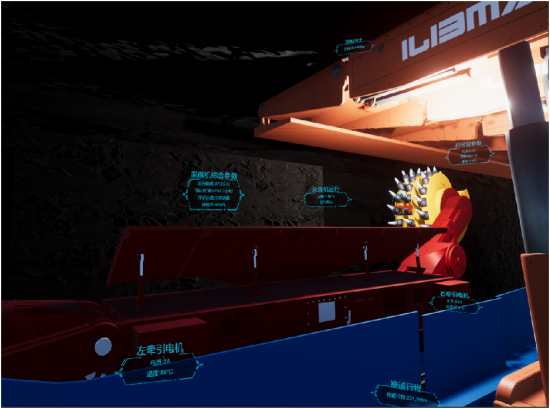
Percepción inteligente: utilice tecnologías de la información de nueva generación como inteligencia artificial, big data e Internet de las cosas para permitir actualizaciones de equipos inteligentes, percibir la tendencia de excavación y excavación de gas, cambios en los objetos de corte, condiciones anormales de velocidad del viento y volumen de aire, coordinación de procesos de excavación y transporte, estado de funcionamiento de equipos como excavadoras y cintas transportadoras, datos de calidad de pozos de perforación para exploración de agua y extracción de gas, y datos del entorno hombre-máquina de las operaciones del personal en el proceso de producción.
-
Toma de decisiones inteligente: análisis de fusión de datos de diseño de ingeniería y datos de percepción inteligente del entorno hombre-máquina en el proceso de producción, combinados con procedimientos de operación de la mina, para lograr una identificación inteligente de condiciones anormales, alarma automática y toma de decisiones inteligente del control de vinculación del equipo.
-
Alarma automática: Combinada con la estructura de la organización laboral y las responsabilidades laborales de la mina, la información de alarma formada por la toma de decisiones inteligente se envía al personal operativo y a los gerentes de todos los niveles.
-
Control de enlace: Basado en la tecnología AI+IOT, se combina de manera efectiva con el sistema de control del equipo para enviar las instrucciones de control del equipo formadas por la toma de decisiones inteligente al equipo de la cara de trabajo de excavación para lograr el control de enlace del equipo, o enviar la información de aviso de operación del equipo al operador para ayudarlo en la operación remota.
















 compatible con la red ipv6
compatible con la red ipv6